Sicherheitsbewertung eines autonom fahrenden Roborace-Rennfahrzeugs
Ansprechpartner: ftm(at)ed.tum.de
Hintergrund und Motivation

In der Automobilbranche ist autonomes Fahren eines der großen Zukunftsthemen. Zum heutigen Stand existieren primär Lösungen zum teilautomatisierten Fahren, bei denen ein Fahrer jederzeit das System überwachen und eingriffsbereit sein muss. Der Schritt zum hochautomatisierten Fahren, bei dem das System bzw. der Hersteller die volle Verantwortung trägt, ist aufgrund der Komplexität der Aufgabe im regulären Straßenverkehr noch nicht getan.
Das Projekt Roborace hat es sich zum Ziel gesetzt, diesen Schritt zu wagen und künftig Rennen mit unbemannten autonomen Fahrzeugen zu bestreiten. Alle Rennen der Roborace-Serie sollen dabei auf regulären Formel-E Stadtkursen ausgetragen werden. Die Fahrzeuge - Robocars - sind mit diversen Sensoren und mehreren Recheneinheiten ausgestattet, um den Fahrer durch Algorithmik zu ersetzen.
Da ein Abbild der komplexen Fahraufgabe meist nicht durch deterministische Verfahren möglich ist, werden vermehrt Methoden der künstlichen Intelligenz (KI) zur Bewegungsplanung eingesetzt. Aufgrund der nichtdeterministischen Natur dieser Ansätze sind die resultierenden Lösungswege nicht ausreichend vorhersehbar. Da Fehlentscheidungen in Kollisionen mit der statischen Umgebung oder anderen Verkehrsteilnehmern resultieren können, ist eine Sicherheitsbewertung der von der KI geplanten Strategien wünschenswert. Aktuell existieren für die Absicherung der auf KI basierenden Trajektorienplanung keine zufriedenstellenden Lösungen.
Ziel
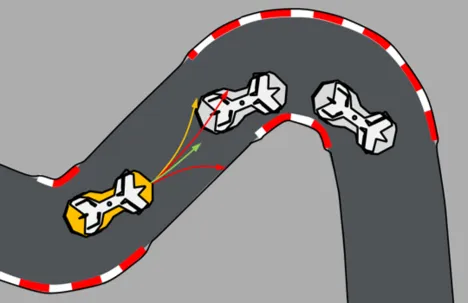
In diesem Projekt soll ein Verfahren zur Sicherheitsbewertung und Absicherung von künstlicher Intelligenz eines autonom fahrenden Roborace-Rennfahrzeugs entwickelt und evaluiert werden. Ein besonderer Fokus liegt dabei auf der Trajektorienplanung. Durch diese Absicherung sollen die Gefahren durch das nichtdeterministische Verhalten der KI abgefangen werden, um eine sichere Trajektorienplanung zu gewährleisten.
Der entwickelte Algorithmus soll in einem autonomen Robocar zum Einsatz kommen. Hierbei besteht die Herausforderung darin, die in Rennen üblichen hochdynamischen Szenarien verarbeiten zu können und Kollisionen auf engem Raum auszuschließen.