Background and Motivation

In the automotive industry, autonomous driving is a topic of tremendous importance for the future. To date, there are primarily solutions for semi-automated driving in which a driver must monitor the system at all time and be ready to intervene. The step to highly automated driving - in which the system or the manufacturer bears full responsibility - is not yet done because of the complexity of the task in regular road traffic.
The Roborace project has set itself the goal of taking this step and to carry out races with unmanned autonomous vehicles. All races of the Roborace series will be held on regular Formula E city circuits. The vehicles - Robocars - are equipped with various sensors and several computing units to replace the driver with algorithms.
Since the imitation of the complex human driving task is usually not possible based on deterministic methods, more and more methods of artificial intelligence (AI) are used for motion planning. Due to the non-deterministic nature of these approaches, the resulting solutions are not sufficiently predictable. Since wrong decisions can result in collisions with the static environment or other road users, a safety assessment of the strategies planned by the AI is desirable. Currently, there are no satisfactory solutions for hedging the AI-based trajectory planning.
Goal
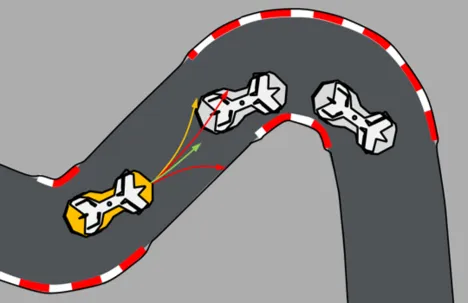
This project aims to develop and evaluate a procedure for safety assessment and safeguarding of artificial intelligence in a self-propelled Roborace racing car. A special focus is on trajectory planning. This safeguard is intended to intercept the dangers of non-deterministic behavior of the AI in order to ensure safe trajectory planning.
The developed algorithm should be used in an autonomous Robocar. The challenge here is to be able to process the highly dynamic scenarios, typical in racing, and to prevent collisions in a confined space.