Adaptive robuste Modellprädiktive Regelung für die Trajektorienverfolgung autonomer Fahrzeuge
Ansprechpartner: Baha Zarrouki, M.Sc.
Problem statement
Within the scope of fully autonomous driving, controlling the vehicle’s lateral- and longitudinal dynamics to follow a given trajectory with acceptable performance in all situations and circumstances is a challenging task.
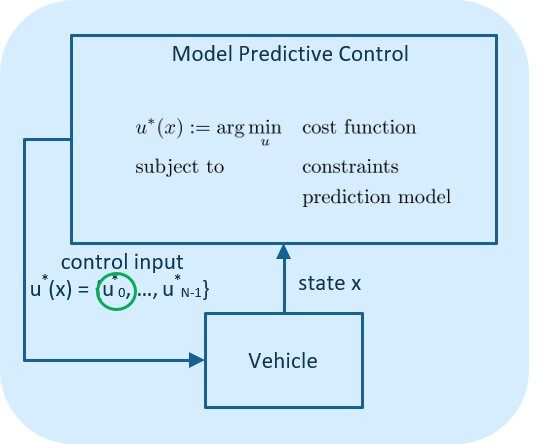
One of the common approaches for autonomous trajectory-following is Model Predictive Control (MPC). MPC determines the optimal steering and/or acceleration inputs for each time step by solving an optimization problem that is specified by a cost function, which formulates our control objectives, and constraints, that consider the vehicle limitations and safety aspects. Based on predicting the vehicle’s future states over a certain horizon, the MPC can act and plan in advance the optimal way to follow the reference trajectory computed by the motion planner. This makes the MPC perform better than conventional controllers, e.g. PID.
Current state-of-the-art MPC can’t make it to solve the above-mentioned problem because of one of the following reasons:
- Robustness against parameter uncertainties and external disturbances is not addressed
- Prediction model does not cover significant aspects of the vehicle dynamics behavior enough
- Use-case specific MPC formulation
- Neglecting the combined limitations on the lateral- and longitudinal dynamics
- Environment dependency: the need for a control expert intervention to switch to a different controller structure or parameter set when operating conditions ought to be changed
Objective & realization
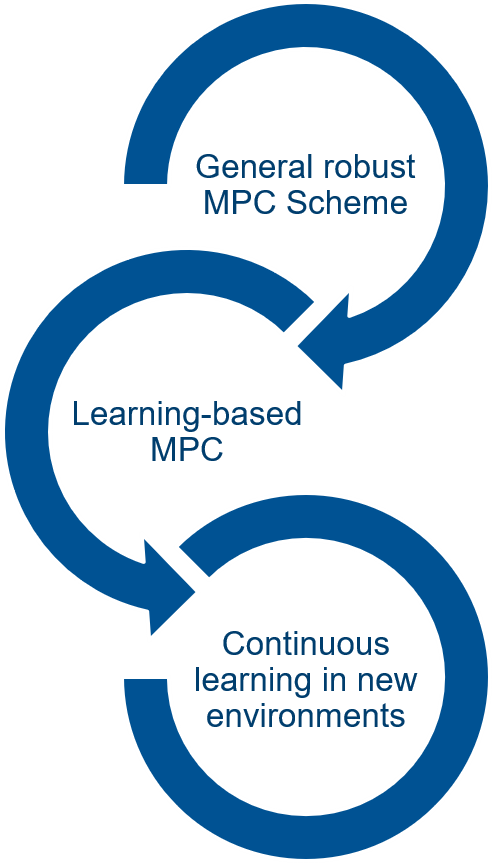
We are focusing our research on developing a general robust adaptive MPC scheme for trajectory following of autonomous vehicles. The general control problem formulation allows us to operate several experimental vehicle types, e.g. passenger vehicles, trucks, or race cars, and further projects with different use cases that require an autonomous trajectory following.
The MPC problem formulation for the combined control of lateral- and longitudinal vehicle dynamics is high-dimensional and complex. We aim to automate the MPC Design process and reduce the manual effort needed by a control expert/engineer. Besides saving enormous time of manual design, automating the process gives us the potential for improving the performance of the closed-loop system w.r.t. our control objectives, e.g. tracking or comfort.
Furthermore, our main research goal is MPC self-adaptivity. When changes to the environment occur, where the MPC is designed, we want to eliminate the manual interventions of the MPC expert to update its configuration. Instead, the MPC should adapt its structure and parametrization automatically according to the new conditions. Additionally, the MPC should be robust against uncertain parameters and external disturbances.
With online continuous learning, we strive for the self-knowledge expansion of the MPC to automatically improve its performance with useful available collected data.
Aktuelle Studienarbeiten im Projekt
Software: TUM AV-Control framework

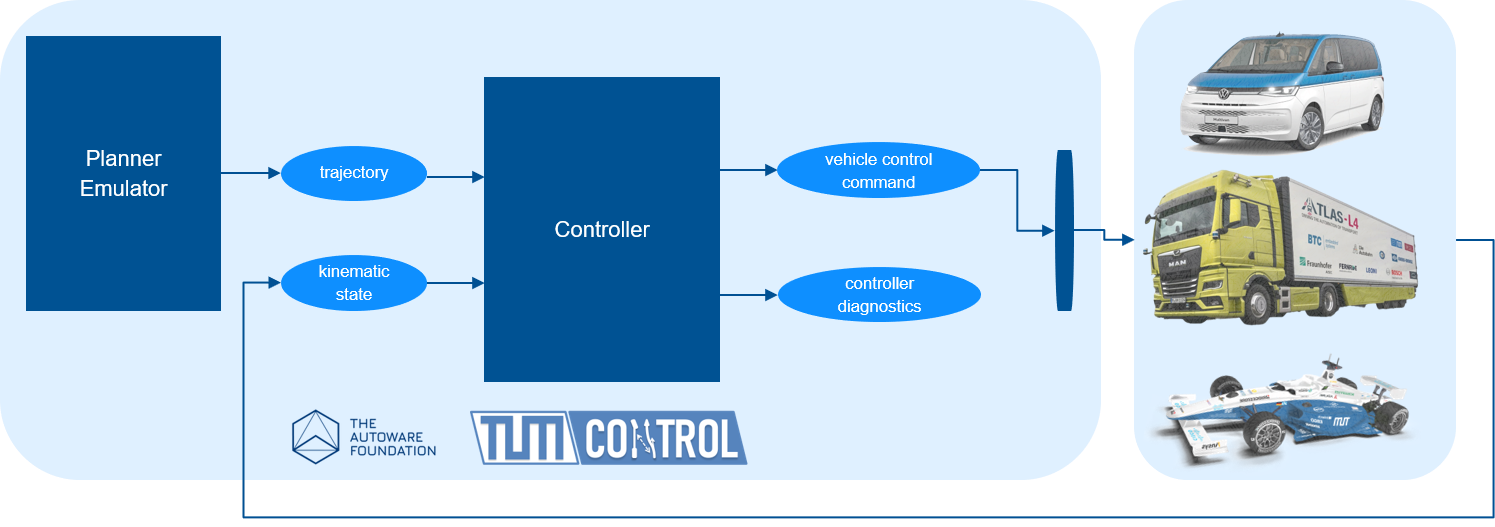
We develop a minimalistic closed-loop controller-vehicle simulation framework that is modular and scalable. It is based on the Autoware Universe interfaces, ROS2 and C++. One of the main advantages of this framework is the capability to isolate the controller from the rest of the software and thus guarantee a static environment for rapid prototyping. The second advantage is that the developed packages can easily be integrated into the rest of the software stack for autonomous driving for the Software- or Hardware-in-the-Loop simulations as well as be deployed on the vehicle.
We will make our TUM AV-Control Simulation framework available and open-source as soon as possible.