Energie-Strategie für autonome elektrische Rennfahrzeuge
Projekt Abgeschlossen - Ansprechpartner: ftm(at)ftm.mw.tum.de
Problemstellung
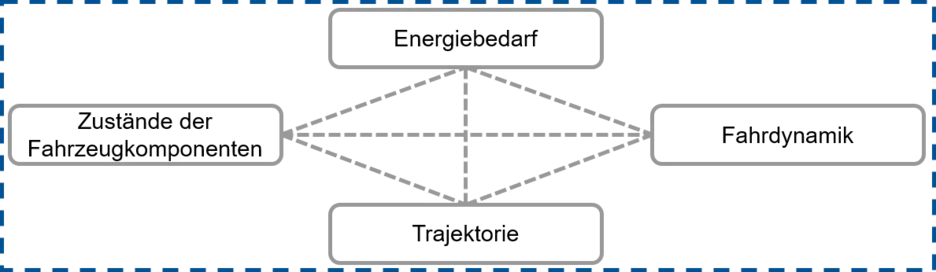
Die Aufgabe einer Energie-Strategie besteht darin, den Energiebedarf eines Fahrzeugs zu optimieren. Dies umfasst bei autonomen Fahrzeugen zunächst eine geschickte Wahl der Fahrtrajektorie sowie die Aufteilung der Leistungsflüsse innerhalb des Fahrzeugs auf dessen Komponenten. So steigt z.B. der Energiebedarf bei fahrdynamisch hoch anspruchsvollen Manövern stark an, die benötigte Zeit zum Erreichen eines Ziels kann sich dadurch allerdings reduzieren. In die Optimierung dieses Zielkonflikts fließen zusätzlich Randbedingungen durch die zulässigen Zustände der einzelnen Fahrzeugkomponenten ein.
Ziel
Ziel des Projekts ist die Entwicklung eines echtzeitfähigen Optimierungsalgorithmus, der eine Energie-Strategie umsetzt. Basis der Berechnungen stellen Zielfunktionen dar, die die Messgrößen aus dem Fahrzeug in zu optimierende Parameter überführen. Für den Nutzer besteht dabei die Möglichkeit, seine Präferenzen zur unterschiedlichen Gewichtung der einzelnen Zielfunktionen anzugeben. Damit soll es möglich sein, den selben Algorithmus sowohl im Straßenverkehr als auch auf der Rennstrecke nutzen zu können. Gleichzeitig sollen beim Betrieb des Fahrzeugs die Komponenten des Antriebsstrangs ihre zulässigen Betriebsbereiche nicht verlassen. Diese definieren somit die Randbedingungen der Optimierung durch die Energie-Strategie.
Vorgehensweise
Zunächst sollen geeignete Stell- und Zielgrößen im Fahrzeug identifiziert werden, die ein großes Potential bei der Energiebedarfsoptimierung bieten. Diese werden dann in geeigneten Optimierungsverfahren implementiert. Ein Fokus liegt dabei auf konventionellen Algorithmen sowie auf Methoden des Machine Learnings.
Die Evaluation der entwickelten Algorithmen findet im Rahmen des Roborace statt. Die Rennen der autonomen Roborace-Serie werden auf regulären Formel E-Stadtkursen ausgetragen.