Problem
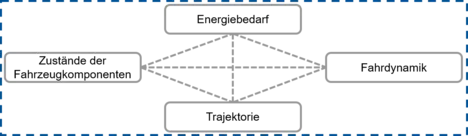
Task of an Energy Management Strategy within a vehicle is the optimization of its energy demand. In the case of autonomous vehicles, this includes the optimization of the planned trajectory as well as the power distribution within the vehicle’s powertrain components. For example, the energy demand rises sharply during highly dynamic driving maneuvers. In contrast, the time required to reach one’s destination gets reduced. For the optimization of the conflicting objectives, additional technical boundary conditions derived from the permissible states of the vehicle components need to be considered.
Goal
The aim of the project is to develop a real-time capable optimisation algorithm that implements an energy strategy. The calculations are based on target functions that transfer the measured variables from the vehicle into parameters to be optimised. The user has the possibility to specify his preferences for different weighting of the individual objective functions. This should make it possible to use the same algorithm both in road traffic and on the race track. At the same time, the components of the drive train should not leave their permissible operating ranges during operation of the vehicle. These thus define the boundary conditions for optimisation by the energy strategy.