OBACHT: Smart Public Transport Infrastructure Control System
Projektbeschreibung
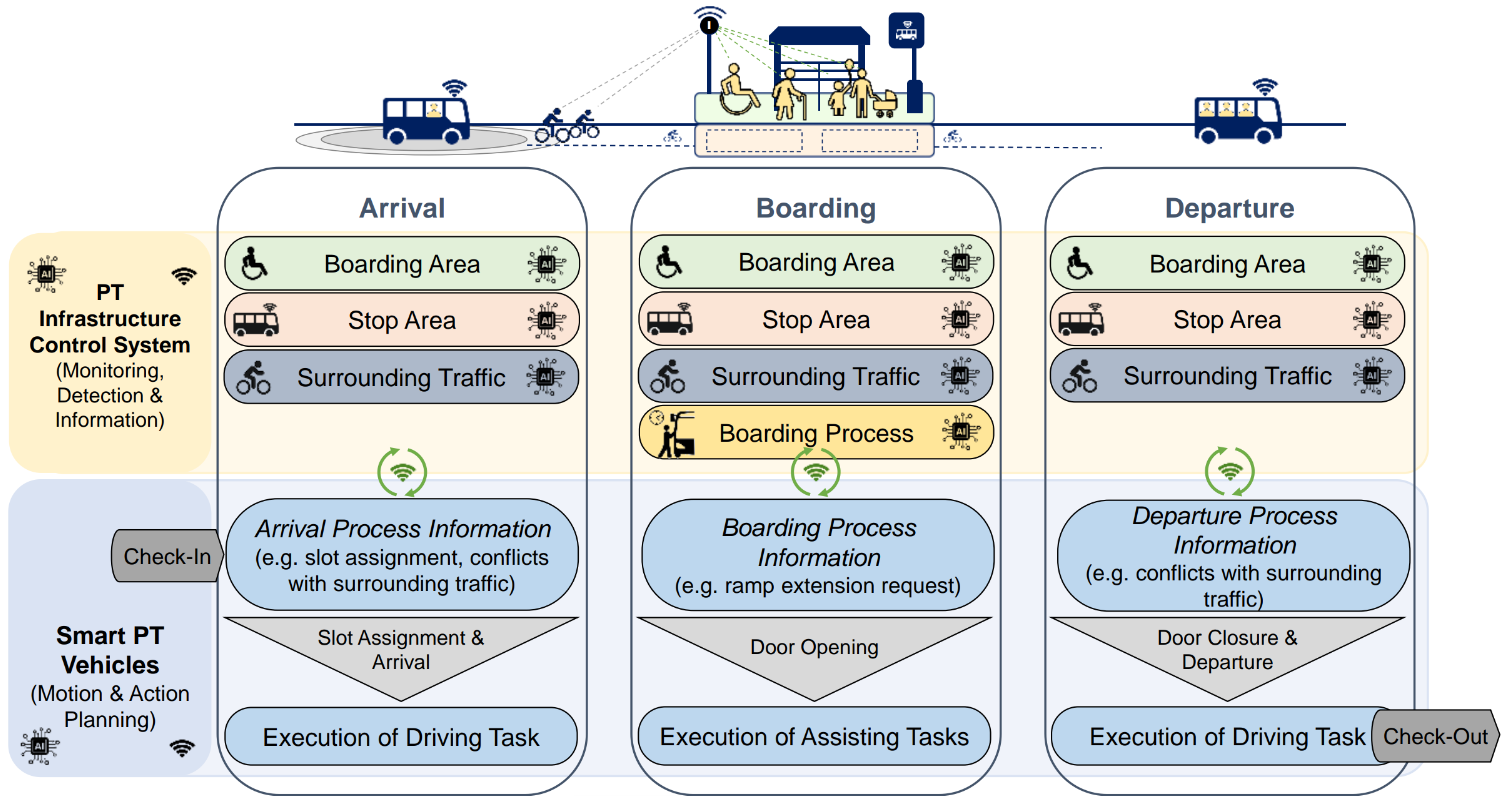
Motiviert durch die schnellen Entwicklungen in der Fahrzeugtechnologie, wie Automatisierung und Vernetzung, erforscht dieses Projekt die Zukunft des öffentlichen Personennahverkehrs (ÖPNV) in städtischen Gebieten. Trotz der Abwesenheit menschlicher Fahrzeugführer in vollautomatisierten ÖPNV-Systemen müssen gemäß gesetzlicher Vorschriften hohe Sicherheitsanforderungen in jeder Situation erfüllt werden, sowie die Verpflichtung, jeden Fahrgast unabhängig von physischen oder kognitiven Einschränkungen zu transportieren. Insbesondere im Ankunfts-, Einstiegs- und Abfahrtsprozess an ÖPNV-Haltestellen gibt es eine Vielzahl von Situationen, in denen heutzutage menschliche Fahrzeugführer eingreifen müssen (z. B. das Übergehen von Haltestellen, das Ausfahren einer Rampe oder Bereitstellung anderer Einsteigehilfen für mobilitätseingeschränkte Fahrgäste, das Vermeiden von Konflikten mit anderen Verkehrsarten).
Durch eine systematische Analyse und Charakterisierung der ÖPNV-Infrastruktur, sicherheitskritischer Situationen an ÖPNV-Haltestellen sowie der aktuellen Verpflichtungen der Fahrzeugführer*innen im ÖPNV werden Experimente in einer kontrollierten Testumgebung durchgeführt (TUM-Teststrecke für automatisiertes und vernetztes städtisches Fahren), die die Einschränkungen ausschließlich fahrzeugbasierter Funktionen aufdecken werden. Ein KI-gestütztes, infrastrukturbasiertes Steuersystem wird entwickelt, um diesen Einschränkungen entgegenzuwirken und die strengen regulatorischen Anforderungen zu erfüllen. Darüber hinaus werden Auswirkungen auf die Gesamtverkehrssicherheit, -effizienz und Zugänglichkeit von ÖPNV-Systemen bewertet und in Empfehlungen für politische Entscheidungsträger, die Erneuerung bestehender Richtlinien für die Gestaltung der ÖPNV-Infrastruktur, ÖPNV-Betreiber und die Industrie einbezogen.
Aufgaben des Lehrstuhls:
- Analyse derzeitiger (nicht automatisierter) öffentlicher Verkehrssysteme
- Definition von Anforderungen, Anwendungsfällen und Versuchsdurchführungen
- Konzeptionierung, Entwurf und simulative Vorab-Erprobung eines infrastrukturbasierten ÖPNV-Steuerungssystems
- Experimentelle Erprobung und Bewertung möglicher Auswirkungen auf das Gesamtverkehrssystem
- Ergebnisverbreitung und Ausarbeitung von Empfehlungen
| Keywords | Automatisierter Öffentlicher Personennahverkehr (ÖPNV); ÖPNV-Infrastrukturplanung; Bewertung der Verkehrssicherheit, -effizienz und Zugänglichkeit von ÖPNV-Systemen; Verkehrsregelkonforme Aktionsplanung für automatisierte Fahrzeuge; Benchmarking von automatisierten Fahrfunktionen; Temporal Logics |
| Auftrag- / Fördergeber | TUM Georg Nemetschek Institut – Artificial Intelligence for the Built World |
| Website | https://www.mdsi.tum.de/gni/gni-funded-projects/obacht/ |
| Weitere Projektbeteiligte | TUM – Professur für Cyber Physical Systems (Prof. Althoff) |
| Laufzeit | 48 Monate (01.2024 – 01.2028) |
| Ansprechpartner | Mario Ilic , Johannes Lindner |