Join the EDGAR Team!
You want to bring autonomous vehicles to the streets of Munich? Join the EDGAR team and write your thesis or student project with us!

Our Goal
We want to show that autonomous driving on public roads is possible. In our quest to prove this, we have set a high goal, we want to show that our software can handle the most complex and challenging situation you can imagine in Munich. This is why we have chosen the Oktoberfest 2024 as our first public showcase.
Why Join Us?
Joninig the EDGAR Team will give you the possibility to write your thesis with us. You will work in an agile team with other students and gain hands-on experience on a state-of-the-art research vehicle. You will be guided by motivated PhDs have the possibility to test your algorithms on the vehicle. To finish things of, you will be part of our final event of at the Oktoberfest 2024.
What We're Looking For
We seek students with a keen interest in autonomous driving software. If you are a highly motivated student who puts extraordinatry effort into your passion, we will provide you with anything you need. Experience with programming languages such as C++ or Python, familiarity with Robotics (ROS2), or prior exposure to Autonomous Driving are advantageous.
What We Offer
We offer thesis and project opportunities across all modules of autonomous driving. Below are some examples but you are also welcome to send us an unsolicited application.
Supervisor: Dominik Kulmer
Camera is all you need
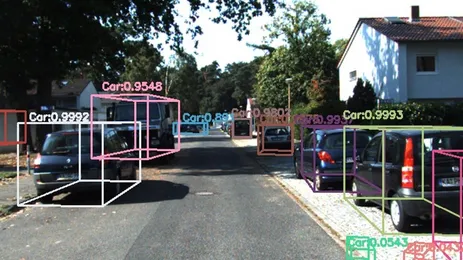
To drive autonomously, one of the most popular car companies has managed to use only Camera for object detection with impressive, but not sufficiently good results. Within the EDGAR team, we want to beat them improve their approach by applying camera-based object detection to drive around Munich.
As part of your student thesis, you will expand the existing EDGAR software stack by incorporating a cutting-edge 3D camera detection module. To accomplish this, your work will involve researching suitable architectural choices based on criteria such as execution time, computational demands, and performance. Subsequently, you will implement and train these architectures using established datasets, followed by a comprehensive evaluation of your results. This evaluation will encompass quantitative assessments using validation data, as well as qualitative evaluations through real-world vehicle testing.
Supervisor: Esteban Rivera
LiDAR is all you need
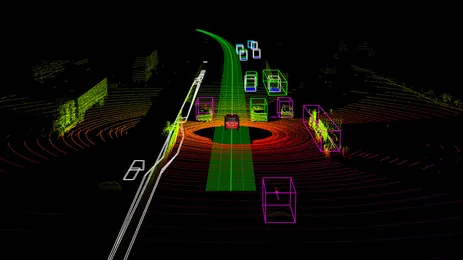
Lidar has emerged as the solution for the issues that camera cannot solve in the topic of autonomous driving. Depth estimation and lack of spatial information are problems of the past, thanks to lidar sensors. Therefore, if Waymo can successfully use LiDAR to detect 3D objects in real-time, so does EDGAR. The goal of this project is to implement a single and multi-LiDAR object detection module to drive around Munich.
As part of your student thesis, you will expand the existing EDGAR software stack by incorporating a cutting-edge 3D LiDAR detection module. To accomplish this, your work will involve researching suitable architectural choices based on criteria such as execution time, computational demands, and performance. Subsequently, you will implement and train these architectures using established datasets, followed by a comprehensive evaluation of your results. This evaluation will encompass quantitative assessments using validation data, as well as qualitative evaluations through real-world vehicle testing
Supervisor: Esteban Rivera


Planner/Controller Tuning
Behavior Planning
Planning with Traffic Rules
Superviser: Tobias Kerbl

How to Apply
Interested? Drop us an email at florian.pfab(at)tum.de with your CV, Transcript of Records, and share your areas of interest and expertise.
Let's drive the future together!