HeatVision: Stereoscopic thermal imaging for driver assistance in unfavourable visibility conditions
Project Completed - Contact: ftm(at)ftm.mw.tum.de
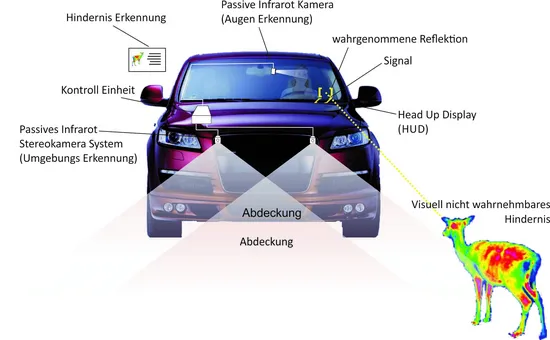
The aim of this research project is to investigate new methods and to develop a novel system to increase driving safety under unfavourable visibility conditions. The system is based on methods of optical augmented reality and uses the windscreen to display information to the driver about the movement data of objects that are not perceptible to him. The idea is based on the synergy of three sub-systems: on the one hand, a perception system is proposed which, using a calibrated thermal stereo camera for three-dimensional analysis, is able to detect obstacles in heavy fog, rain or at night. In particular, the differences in temperature that occur are exploited. This also makes it possible to determine the absolute position or movement of objects in relation to the vehicle. Thus, people, vehicles or animals on the road can be detected in time. The second focal point is the radiation-free tracking of the driver's eye position using a miniature thermal imaging camera. This information is used to dynamically project the warning notices onto the windscreen (third centre of gravity), i.e. the position of the superimposed graphics is calculated - between the real object and the driver's eyes - in such a way that the presence of the object, even when the head is moving, is indicated to the user via the invisible environment at the correct distance. To integrate all system components into an "automotive" suitable demonstrator, the developed methods are integrated into an embedded processing unit (fourth focal point).