Synchronous Driving State and Parameter Estimation for improving Driving Dynamics Control
Project Completed - Contact: ftm(at)ftm.mw.tum.de
Motivation
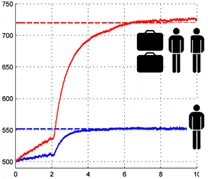
Current developments in the field of small electric vehicles aim, among other things, at a significantly lower unladen weight compared to conventional vehicles. As a result, the influence of loading with passengers and luggage on vehicle parameters such as mass, inertia and centre of gravity is many times greater. It is therefore not possible to assume that the parameters for control systems or condition estimators will remain more or less constant.
Goal
The aim is therefore to determine these physical quantities during the first few minutes of any journey in order to improve the accuracy of model-based control systems. As a boundary condition it is required that no additional sensor technology is available beyond the standard equipment of vehicles with ESP.
Procedure
Starting from a suitable non-linear vehicle and tyre model, various algorithms are implemented in the form of real-time capable filters and optimisers. On the basis of a standard ride to be defined, these are compared and evaluated with regard to the dependence of the convergence behaviour and the estimation quality on the dynamics of the ride.
After a simulative design, the test is carried out in a road test with the test vehicle MUTE.