Become part of the EDGAR team and participate in applied research on the autonomous driving of tomorrow. We offer PhD positions as well as various opportunities for students.
The Idea
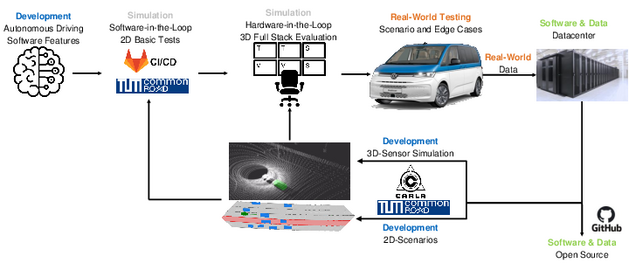
A large number of algorithms already exist in the state of the art that focus on the individual subtasks of autonomous driving, such as image recognition or vehicle longitudinal control. The great challenge, however, is still to develop an optimal overall software for the autonomous driving task from the individual modules. The application of the individual functional modules in the overall software results in new dependencies and interlinked effects. In addition, the hard constraints of limited computing capacity in the vehicle and the lowest possible latencies come into play. Our research focus is on this overall software approach with the goal of real applications on the target hardware. This allows us to precisely specify the critical molecules in the software and the intermodal sensitivity, and to derive research topics that relate directly to a specific application-relevant problem.
The application of the developed software under real conditions takes place on a Level-5 capable research vehicle, which is equipped with extensive sensor technology for recording the environment and the own vehicle state, high-performance computers for the application of the software as well as interfaces for the control of the longitudinal and lateral guidance. In addition, the high-performance computers are embedded in an extensive simulation environment, which is used during the whole development phase and for the automated testing of the software functionality in the run-up to real vehicle tests. The research vehicle incl. data center and simulator are funded by a proposal at the German Research Foundation (DFG) (approval according to Art. 91b GG with DFG-number INST 95/1653-1 FUGG).
The Goal
Our goal is always the specific application-driven further development of existing algorithms with regard to the optimal overall software. For this purpose, we look for complex, selected application areas (operation design domain, ODD), which we use to demonstrate our software functionality and for the final validation of our development work. Our next target ODD, in which we want to demonstrate driving with our development vehicle and the developed software, are urban scenarios in inner-city traffic of Munich as well as hub-to-hub highway driving. Despite the specified target ODD, we always pursue the goal of developing an overall software that is as generic as possible and can be applied to different road users, road geometries, speed ranges, and weather conditions. The extensive sensor technology of the research vehicle will also be used to build a multimodal data set that will be published to support development activities.
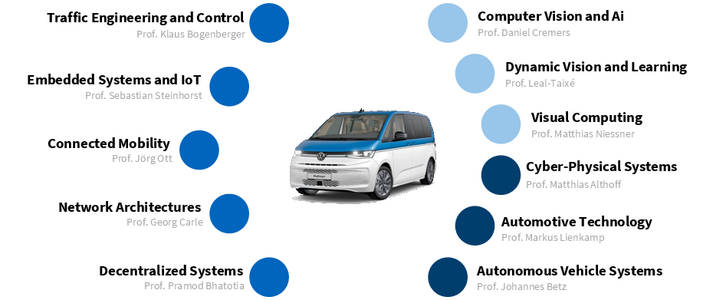
The Team
The FTM has the goal of combining the core competencies of various chairs in this project and creating synergies in the development and application of the research content. The following members of the Chair of Automotive Engineering are currently involved in the project:
Betz, Johannes; Betz, Tobias; Fent, Felix; Geisslinger, Maximilian; Heilmeier, Alexander; Hermansdorfer, Leonhard; Herrmann, Thomas; Huch, Sebastian; Karle, Phillip; Lienkamp, Markus; Lohmann, Boris; Nobis, Felix; Ögretmen, Levent; Rowold, Matthias; Sauerbeck, Florian; Stahl, Tim; Trauth, Rainer; Werner, Frederik; Wischnewski, Alexander: TUM autonomous motorsport: An autonomous racing software for the Indy Autonomous Challenge. Journal of Field Robotics, 2023 more…
Betz, Tobias; Karle, Phillip; Werner, Frederik; Betz, Johannes: An Analysis of Software Latency for a High-Speed Autonomous Race Car—A Case Study in the Indy Autonomous Challenge. SAE International Journal of Connected and Automated Vehicles 6 (3), 2023 more…
Betz, Tobias; Schmeller, Maximilian; Korb, Andreas; Betz, Johannes: Latency Measurement for Autonomous Driving Software Using Data Flow Extraction. 2023 IEEE Intelligent Vehicles Symposium (IV), IEEE, 2023 more…
Betz, Tobias; Schmeller, Maximilian; Teper, Harun; Betz, Johannes: How Fast is My Software? Latency Evaluation for a ROS 2 Autonomous Driving Software. 2023 IEEE Intelligent Vehicles Symposium (IV), IEEE, 2023 more…
Geisslinger, Maximilian; Poszler, Franziska; Lienkamp, Markus: An ethical trajectory planning algorithm for autonomous vehicles. Nature Machine Intelligence, 2023 more…
Huch, Sebastian; Lienkamp, Markus: Towards Minimizing the LiDAR Sim-to-Real Domain Shift: Object-Level Local Domain Adaptation for 3D Point Clouds of Autonomous Vehicles. Sensors 23 (24), 2023, 9913 more…
Huch, Sebastian; Scalerandi, Luca; Rivera, Esteban; Lienkamp, Markus: Quantifying the LiDAR Sim-to-Real Domain Shift: A Detailed Investigation Using Object Detectors and Analyzing Point Clouds at Target-Level. IEEE Transactions on Intelligent Vehicles, 2023, 1-14 more…
Sauerbeck, Florian; Halperin, Dan; Connert, Lukas; Betz, Johannes: CamRaDepth: Semantic Guided Depth Estimation Using Monocular Camera and Sparse Radar for Automotive Perception. IEEE Sensors Journal 23 (22), 2023, 28442-28453 more…
Sauerbeck, Florian; Huch, Sebastian; Fent, Felix; Karle, Phillip; Kulmer, Dominik; Betz, Johannes: Learn to See Fast: Lessons Learned From Autonomous Racing on How to Develop Perception Systems. IEEE Access 11, 2023, 44034-44050 more…
Sauerbeck, Florian; Obermeier, Benjamin; Rudolph, Martin; Betz, Johannes: RGB-L: Enhancing Indirect Visual SLAM Using LiDAR-Based Dense Depth Maps. 2023 3rd International Conference on Computer, Control and Robotics (ICCCR), IEEE, 2023 more…
2022
Dwivedi, Tanay; Betz, Tobias; Sauerbeck, Florian; Manivannan, Pv; Lienkamp, Markus: Continuous Control of Autonomous Vehicles using Plan-assisted Deep Reinforcement Learning. 2022 22nd International Conference on Control, Automation and Systems (ICCAS), IEEE, 2022 more…
Herrmann, Thomas; Sauerbeck, Florian; Bayerlein, Maximilian; Betz, Johannes; Lienkamp, Markus: Optimization-Based Real-Time-Capable Energy Strategy for Autonomous Electric Race Cars. SAE International Journal of Connected and Automated Vehicles 5 (1), 2022 more…
Karle, Phillip; Geisslinger, Maximilian; Betz, Johannes; Lienkamp, Markus: Scenario Understanding and Motion Prediction for Autonomous Vehicles - Review and Comparison. IEEE Transactions on Intelligent Transportation Systems, 2022, 1-21 more…
Sauerbeck, Florian; Baierlein, Lucas; Betz, Johannes; Lienkamp, Markus: A Combined LiDAR-Camera Localization for Autonomous Race Cars. SAE International Journal of Connected and Automated Vehicles 5 (1), 2022 more…
Passigato, Francesco; Wischnewski, Alexander; Gordner, Achim; Diermeyer, Frank: Two Approaches for the Synthesis of a Weave-Wobble-stabilizing Controller in Motorcycles. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), IEEE, 2021 more…
Tobias, Betz; Fujiishi, Hidehito; Kobayashi, Taisuke: Behavioral Cloning from Observation with Bi-directional Dynamics Model. 2021 IEEE/SICE International Symposium on System Integration (SII), IEEE, 2021 more…
2020
Heilmeier, Alexander; Wischnewski, Alexander; Hermansdorfer, Leonhard; Betz, Johannes; Lienkamp, Markus; Lohmann, Boris: Minimum curvature trajectory planning and control for an autonomous race car. Vehicle System Dynamics 58 (10), 2020, 1497-1527 more…
Hermansdorfer, Leonhard; Trauth, Rainer; Betz, Johannes; Lienkamp, Markus: End-to-End Neural Network for Vehicle Dynamics Modeling. 2020 6th IEEE Congress on Information Science and Technology (CiSt), IEEE, 2020 more…
Herrmann, Thomas; Wischnewski, Alexander; Hermansdorfer, Leonhard; Betz, Johannes; Lienkamp, Markus: Real-Time Adaptive Velocity Optimization for Autonomous Electric Cars at the Limits of Handling. IEEE Transactions on Intelligent Vehicles, 2020, 1-1 more…
2019
Betz, Johannes; Wischnewski, Alexander; Heilmeier, Alexander; Nobis, Felix; Hermansdorfer, Leonhard; Stahl, Tim; Herrmann, Thomas; Lienkamp, Markus: A Software Architecture for the Dynamic Path Planning of an Autonomous Racecar at the Limits of Handling. 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), IEEE, 2019 more…
Heilmeier, Alexander; Geisslinger, Maximilian; Betz, Johannes: A Quasi-Steady-State Lap Time Simulation for Electrified Race Cars. 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), IEEE, 2019 more…
Nobis, Felix; Geisslinger, Maximilian; Weber, Markus; Betz, Johannes; Lienkamp, Markus: A Deep Learning-based Radar and Camera Sensor Fusion Architecture for Object Detection. 2019 Sensor Data Fusion: Trends, Solutions, Applications (SDF), IEEE, 2019 more…
Stahl, Tim; Wischnewski, Alexander; Betz, Johannes; Lienkamp, Markus: ROS-based localization of a race vehicle at high-speed using LIDAR. E3S Web of Conferences 95, 2019, 04002 more…
Stahl, Tim; Wischnewski, Alexander; Betz, Johannes; Lienkamp, Markus: Multilayer Graph-Based Trajectory Planning for Race Vehicles in Dynamic Scenarios. 2019 IEEE Intelligent Transportation Systems Conference (ITSC), IEEE, 2019 more…