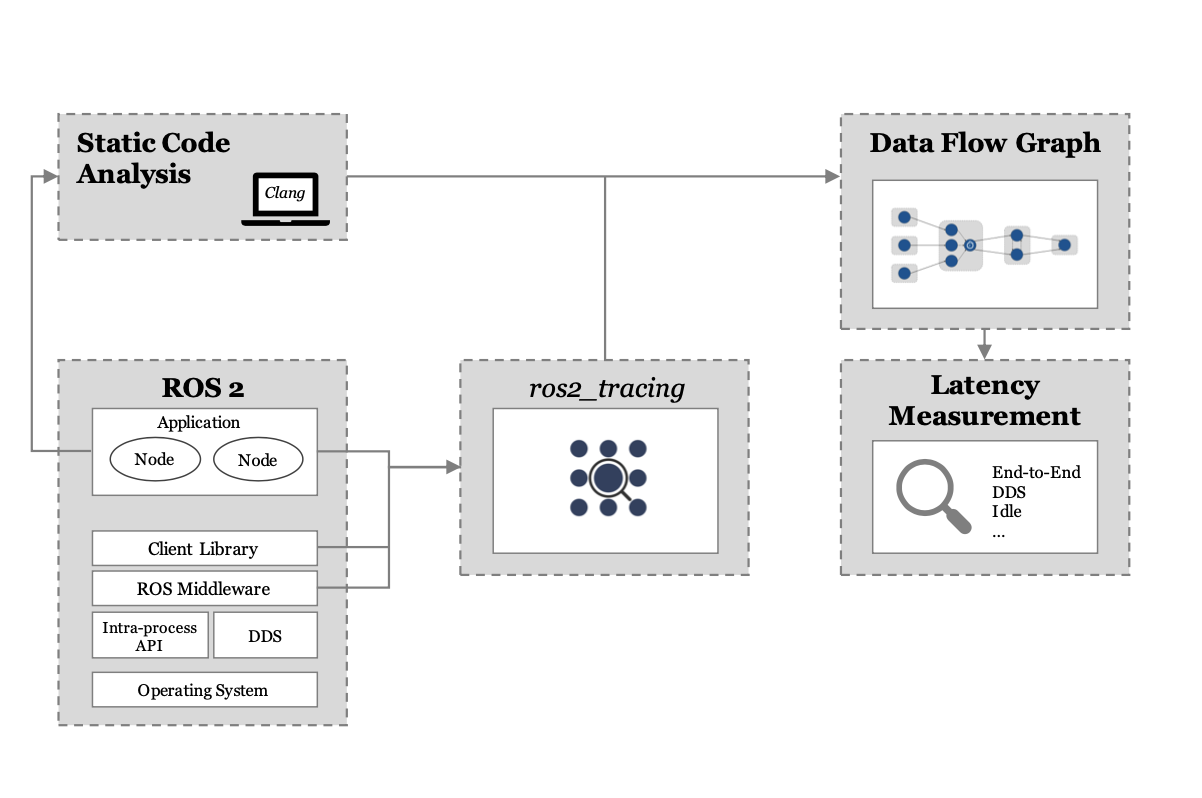
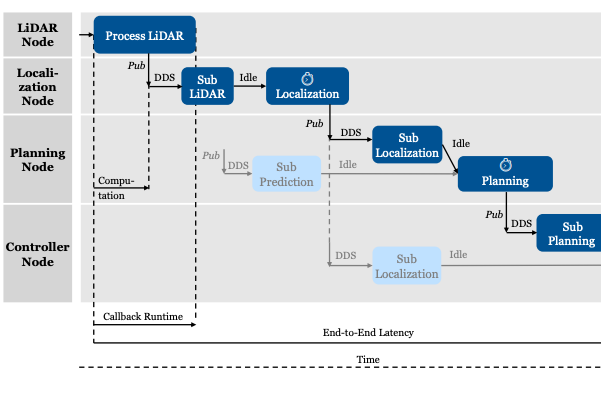
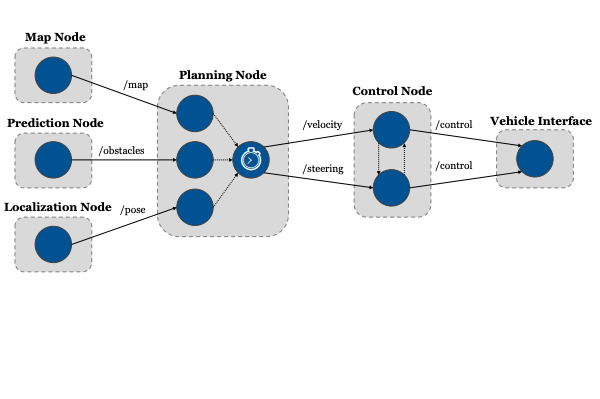
Unser AVS Lab hat auf Github neuen Open-Source Software veröffentlicht. Das Repository beinhaltet ein Softwaretool, welches zur Latenzanalyse von ROS2 basierten Softwarearchitekturen eingesetzt werden kann. Normalerweise bestehen ROS2 Software Systeme aus einer hohen Anzahl von Publisher und Subscriber Modulen. Unsere Softwaretool ist in der Lage automatisiert einen Datenflussgraphen (DFG) für ROS2-Software Architekturen mit Hilfe einer statischen Codeanalyse zu erstellen. Dadurch können Datenabhängigkeiten eines C++-basierten ROS2-Systems ohne manuelle Annotation gefunden und leichter visualisiert werden. Das Software Tool kann für verschiedene Robotik Applikationen wie z. B. Autonome Fahrzeuge eingesetzt werden.
Link zum Github Repository
Aktuelles
Neue Open-Source Software veröffentlicht