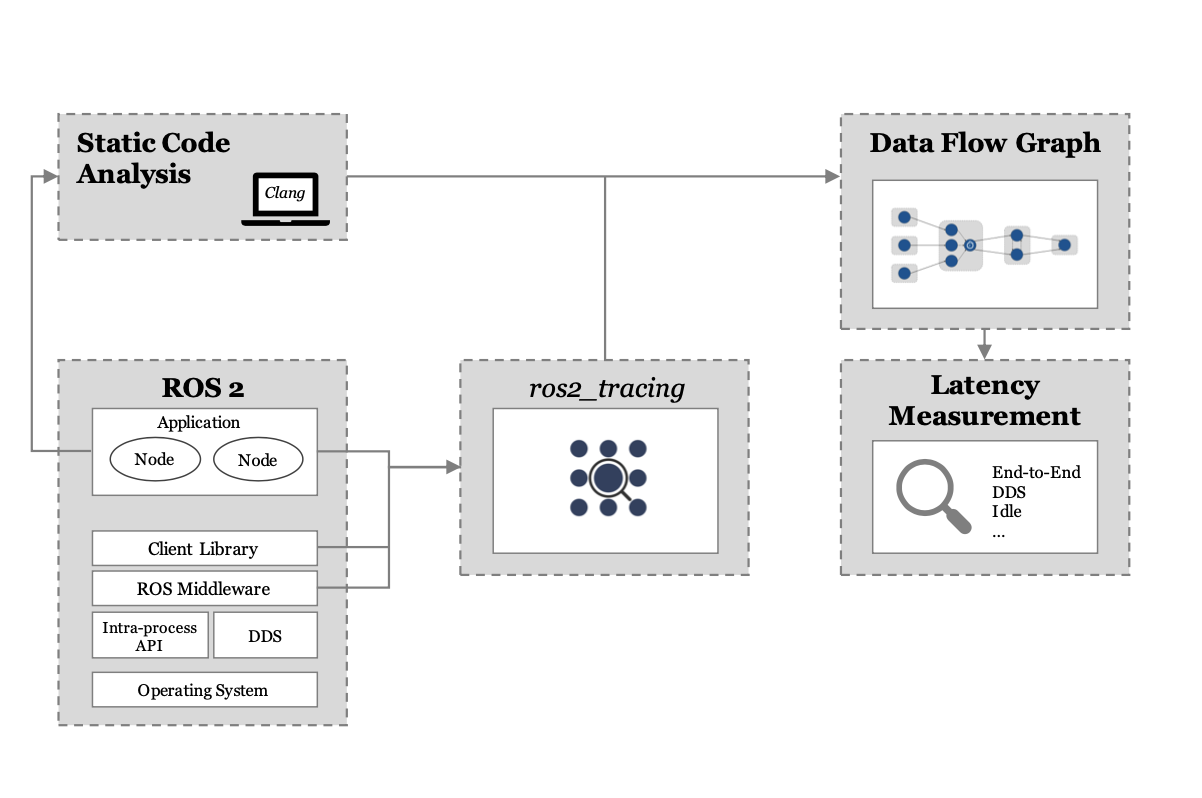
Our AVS Lab has released new open source software on Github. The repository contains a software tool that can be used for latency analysis of ROS2 based software architectures. Typically, ROS2 software systems consist of a high number of publisher and subscriber modules. Our software tool is able to automatically create a data flow graph (DFG) for ROS2 software architectures using static code analysis. This allows data dependencies of a C++-based ROS2 system to be found and visualized more easily without manual annotation. The software tool can be used for various robotics applications such as autonomous vehicles.
Skip to content
Menu
- de
- en
Google Custom Search
Wir verwenden Google für unsere Suche. Mit Klick auf „Suche aktivieren“ aktivieren Sie das Suchfeld und akzeptieren die Nutzungsbedingungen.