Wir freuen uns ein neues Software Paket für autonome Fahrfunktionen der Community Open-Source zur Verfügung stellen zu können: ORB SLAM3 RGB-L.
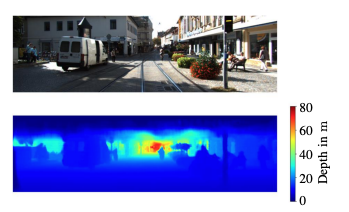
In dieser Arbeit fügen wir dem bekannten ORB-SLAM3 den RGB-L (LiDAR) Modus hinzu. Dies ermöglicht es, LiDAR-Tiefenmessungen direkt in das visuelle SLAM zu integrieren. Auf diese Weise erhalten wir eine Genauigkeit, die einer Stereocamera extrem nahe kommt. Gleichzeitg konnten wir die Berechnungszeiten stark reduzieren. Eine exakte Beschreibung der Algorithmen findet ihr in unserem Paper "RGB-L: Enhancing Indirect Visual SLAM using LiDAR-based Dense Depth Maps".
Unser Ziel war es, eine einfache, aber leistungsstarke Lösung zu schaffen, die jedem zugänglich ist. Deshalb haben wir uns entschieden, die Software als Open-Source-Projekt zu veröffentlichen. Wir hoffen, dass die Community die Möglichkeit nutzt, die Software weiterzuentwickeln und zu verbessern.
Die Software ist ab sofort verfügbar und kann auf unserer Github Seite heruntergeladen werden. Wir freuen uns darauf, euer Feedback zu hören und gemeinsam mit euch an der Weiterentwicklung diese Software zu arbeiten.