We are pleased to open-source a new software package for autonomous driving functions to the community: ORB SLAM3 RGB-L.
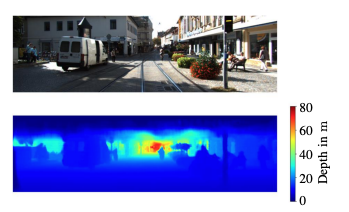
In this work, we add RGB-L (LiDAR) mode to the well-known ORB-SLAM3. This allows us to integrate LiDAR depth measurements directly into the visual SLAM. In this way, we obtain an accuracy that is extremely close to a stereo camera. At the same time, we were able to greatly reduce computation times. A detailed description of the algorithms can be found in our paper "RGB-L: Enhancing Indirect Visual SLAM using LiDAR-based Dense Depth Maps".
Our goal was to create a simple but powerful solution that is accessible to everyone. Therefore, we decided to release the software as an open source project. We hope that the community will take the opportunity to develop and improve the software.
The software is available now and can be downloaded from our Github page. We look forward to hearing your feedback and working with you to further develop this software.
Link to the Github code repository