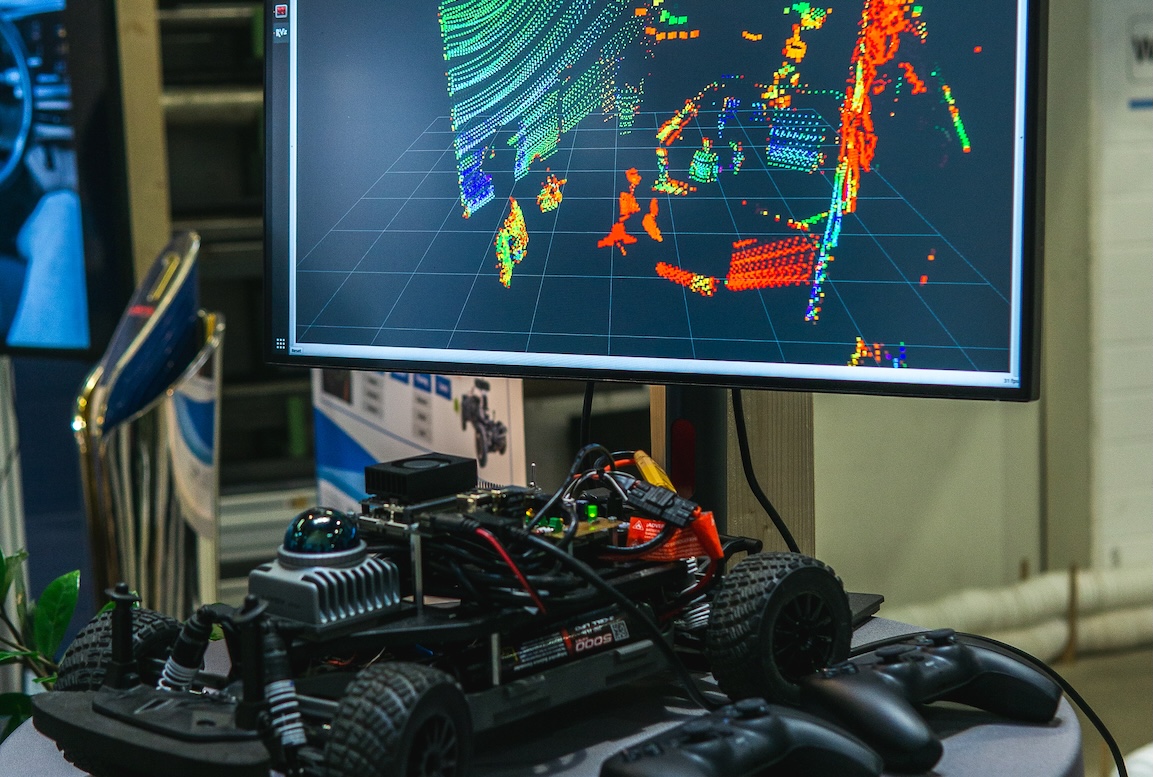
There is a new Open-Source Software from our AVS Lab. We recently released RoboRacer-3DLiDAR, which enables the usage of the Livox 3D Lidar on the F1TENTH/RoboRacer vehicle. This is a new open-source software package designed to streamline the integration and use of 3D LiDAR sensors in autonomous racing platforms.
Developed as part of the RoboRacer project, the software provides a robust and flexible interface for real-time LiDAR data acquisition, processing, and visualization. It is tailored specifically for high-performance, low-latency environments typical in autonomous racing, where rapid perception and control are critical.
RoboRacer-3DLiDAR simplifies the use of LiDAR hardware in robotics applications by offering out-of-the-box compatibility, easy-to-use configuration tools, and integration with standard robotics middleware such as ROS. Its modular design also allows for quick adaptation to different sensors and platforms.
By making this tool publicly available at github.com/TUM-AVS/RoboRacer-3DLiDAR, the AVS Lab hopes to support researchers, developers, and hobbyists working on cutting-edge autonomous systems and accelerate innovation in fast-paced robotics domains.