Forschungsfahrzeug: EDGAR

Unser Forschungsfahrzeug EDGAR (Excellent Driving GARching) ermöglicht uns die entwickelte Software unter realen Bedingung auf der Straße zu Testen. Das Forschungsfahrzeug ist mit umfangreicher Sensorik zur Erfassung der Umgebung und des eigenen Fahrzeugzustands, Hochleistungsrechnern zur Anwendung der Software sowie Schnittstellen zur Ansteuerung der Längs- und Querführung ausgerüstet. Zudem sind die Hochleistungscomputer baugleich in eine umfangreiche Simulationsumgebung eingebettet, welche während der gesamten Entwicklungsphase und für das automatisierte Abtesten der Softwarefunktionalität im Vorlauf von Realfahrzeugtests genutzt wird. Das Forschungsfahrzeug inkl. Datencenter und Simulator sind durch einen Großgeräteantrag der Deutschen Forschungsgemeinschaft (DFG) gefördert (Bewilligung nach Art. 91b GG, DFG-Aktenzeichen INST 95/1653-1 FUGG).

Das RoboRacer-Fahrzeug ist ein autonomes Forschungsfahrzeug im Maßstab 1:10. Es besteht aus einer modifizierten RC-Auto-Plattform, die mit einer Vielzahl von Sensoren wie Lidar, Kameras und IMUs ausgestattet ist, um Echtzeitdaten über die Umgebung zu erfassen. Die Plattform wird von einem leistungsstarken Einplatinencomputer mit GPU (Nvidia Jetson) gesteuert, der komplexe Algorithmen für die Wahrnehmung, Planung und Steuerung ausführt. Durch die Kombination von Sensorik und Rechenleistung ermöglicht das RoboRacer-Fahrzeug die Entwicklung und Erprobung autonomer Fahrtechnologien in einem realistischen und dennoch sicheren Umfeld.
Autonomes Rennauto: Abu Dhabi Autonomous Racing League (A2RL)

Das autonome Rennfahrzeug EAV-25 wird in der A2RL eingesetzt und basiert auf einem modifizierten Rennchassis des Herstellers Dallara (abgeleitet aus dem Super-Formula SF-23). Das Fahrzeug ist mit einer umfassenden Sensor- und Elektronikarchitektur ausgestattet: Es nutzt mehrere LiDAR-Sensoren, Radarsysteme sowie Kameras (für 360°-Rundumsicht) und GNSS / GPS-Navigation. Zudem enthält das System zwei Inertial Measurement Units (IMUs) für redundante Lage- und Bewegungsanalyse Darüber hinaus wurde das Fahrzeug für die Anforderungen autonomer Hochgeschwindigkeitsrennen optimiert: Die Elektronik wurde robuster ausgelegt (robuste Verkabelung, vibrationsfeste Datenträger), die Sensorfusion und Software-Logik überarbeitet, um in Echtzeit zuverlässige Entscheidungen zu ermöglichen — inkl. Notfall-Bremssystem und Sicherheitsfeatures. Dank des modifizierten Antriebs und des optimierten Fahrwerks kann das Auto Spitzengeschwindigkeiten von circa 260 km/h erreichen.
Autonomes Rennauto: Indy Autonomous Challenge
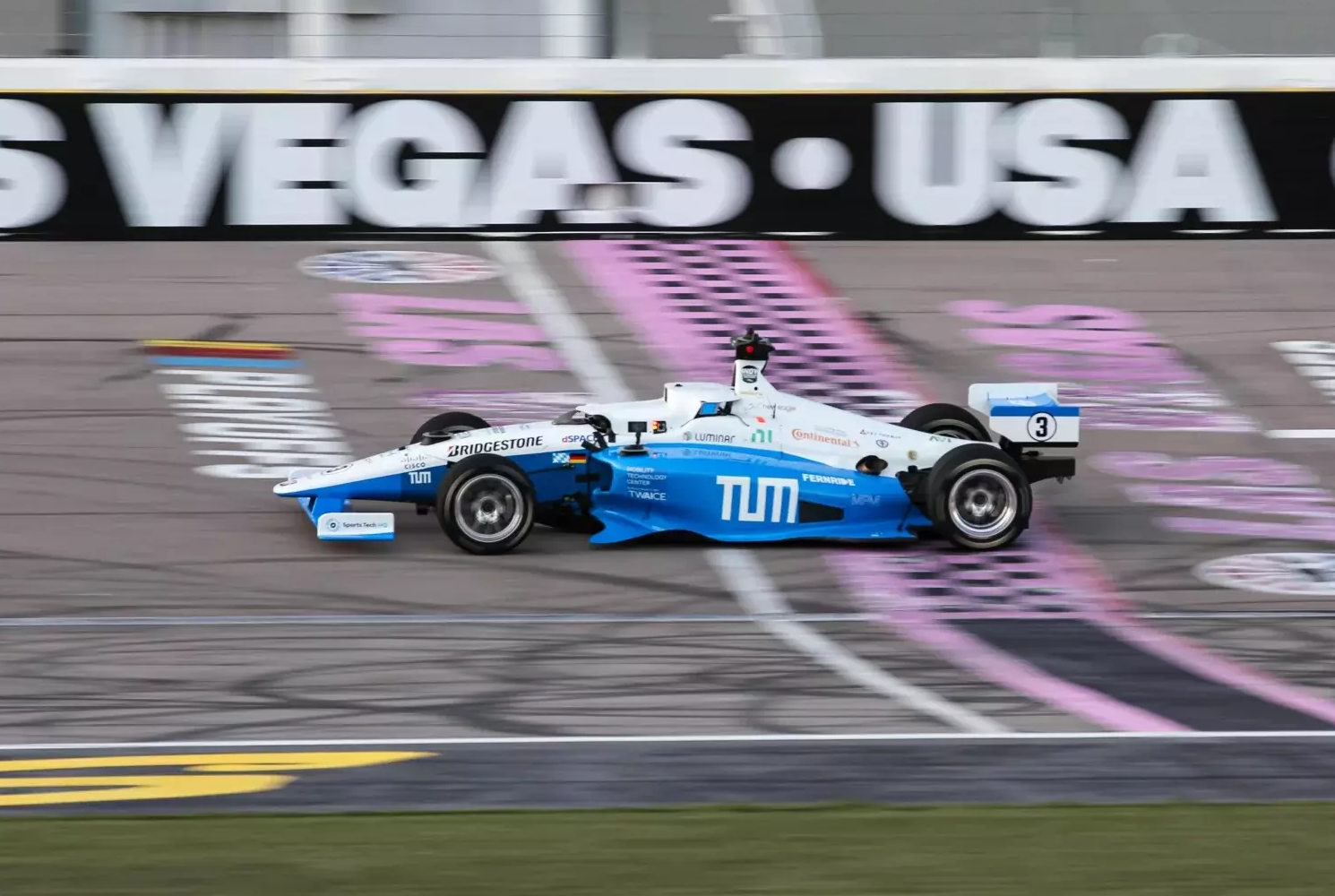
Das autonome Rennfahrzeug Dallara AV-21 wird von unsere TUM Autonomous Motorsport Team betrieben. Das Fahrzeugs ist mit dem Adlink – AVA 3501 Computer, NVIDIA Quadro RTX 8000 GPU, Luminar Hydra LiDAR, Novatel Powerpak GPS/IMU, Mako Kamera und Aptiv (ESR-MRR) Radar ausgestattet. Seine Hardware und Software sind für autonomes Hochgeschwindigkeitsrennen konzipiert und erreichen eine Höchstgeschwindigkeit von 281 km/h. Die Sensorarchitektur und Computersysteme des Fahrzeugs sind speziell für die Indy Autonomous Challenge entwickelt, mit einem Fokus auf Leistung und Zuverlässigkeit bei hohen Geschwindigkeiten. Der AV-21 zeigt Fortschritte in der Technologie autonomer Fahrzeuge mit einem Schwerpunkt auf Geschwindigkeit, Präzision und Anpassungsfähigkeit in einem Wettbewerbsumfeld.
InMotion Robotic Sid1 Venture - Legged Robot

Der SID1 – Lite³ Venture von Inmotion Robotics ist ein quadrupeder Roboter mit hohem Drehmomentantrieb, der präzise und dynamische Bewegungen in unebenem Gelände ermöglicht. Er verfügt über modulare Schnittstellen (Ethernet, 5 V/12 V/24 V) zur Integration externer Sensorik sowie eine Reichweite von bis zu 4 km bei 1,5–2 Stunden Laufzeit. Seine offene Softwarearchitektur (BOW SDK) erlaubt Programmierung in Python oder C++ und unterstützt Echtzeit-Visualisierung sowie autonome Navigation.
Unitree B2-Wheeled + Z1 Arm

Das Unitree B2 Wheeled + Unitree Z1 Arm System kombiniert die Mobilität eines modernen radbasierten Quadruped-Roboters mit der Präzision eines manipulatorgestützten Greifarms. Diese Plattform ermöglicht sowohl dynamische Fortbewegung auf unterschiedlichem Terrain als auch präzise Interaktionsaufgaben, etwa Greifen, Öffnen oder Werkzeugführung. Sie dient als vielseitige Forschungsplattform für mobile Manipulation, autonome Navigation und Mensch-Roboter-Interaktion.
Unitree G1 EDU

Der Unitree G1 EDU ist ein kompakter humanoider Forschungsroboter, der auf stabile, menschenähnliche Bewegungen ausgelegt ist. Er verfügt über bis zu 43 Gelenkmotoren, eine Akkulaufzeit von bis zu zwei Stunden sowie integrierte Sensorik, darunter eine Tiefenkamera und ein LiDAR für eine 360°-Umgebungswahrnehmung.