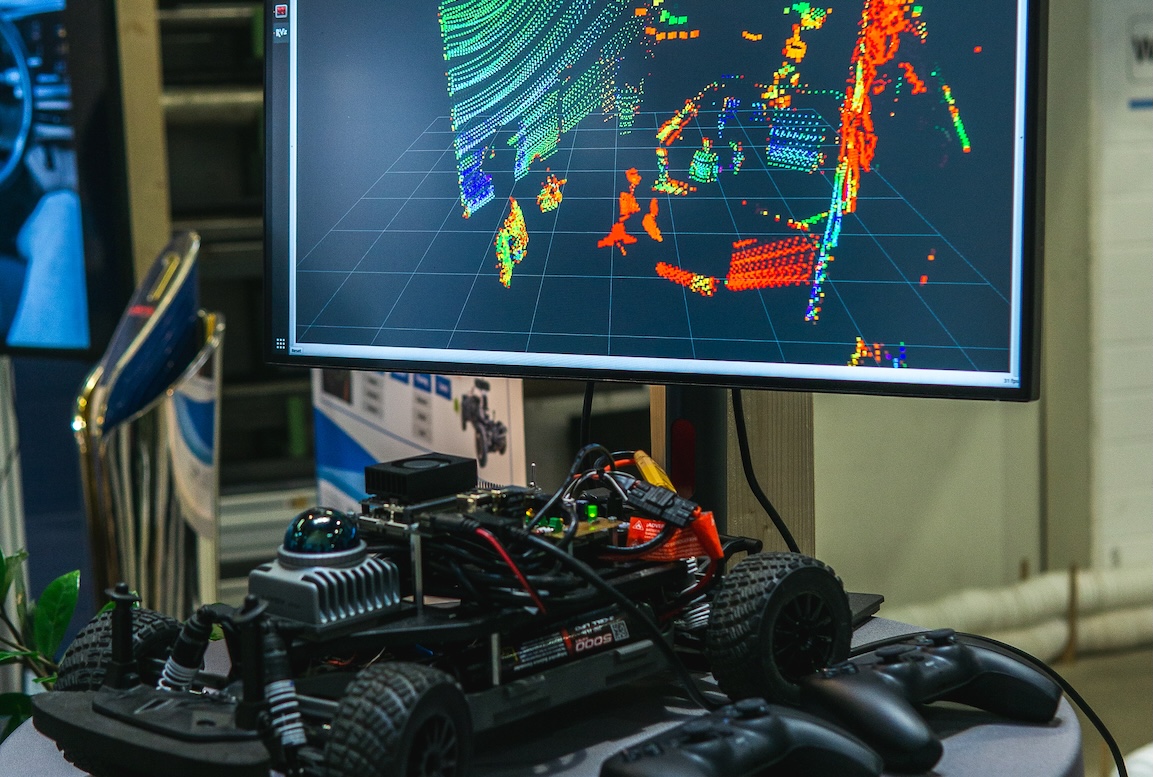
Es gibt eine neue Open-Source-Software aus unserem AVS Lab. Wir haben kürzlich RoboRacer-3DLiDAR veröffentlicht – eine Software, die den Einsatz des Livox 3D LiDAR auf dem F1TENTH/RoboRacer-Fahrzeug ermöglicht. Dabei handelt es sich um ein neues Open-Source-Softwarepaket, das die Integration und Nutzung von 3D-LiDAR-Sensoren in autonomen Rennplattformen erheblich vereinfacht.
Die Software wurde im Rahmen des RoboRacer-Projekts entwickelt und bietet eine robuste und flexible Schnittstelle für die Echtzeit-Erfassung, -Verarbeitung und -Visualisierung von LiDAR-Daten. Sie ist speziell auf Hochleistungsumgebungen mit niedriger Latenz zugeschnitten, wie sie im autonomen Rennsport typisch sind – dort, wo schnelle Wahrnehmung und Kontrolle entscheidend sind.
RoboRacer-3DLiDAR vereinfacht den Einsatz von LiDAR-Hardware in robotischen Anwendungen durch sofort einsatzbereite Kompatibilität, benutzerfreundliche Konfigurationstools und die Integration in gängige Robotik-Middleware wie ROS. Dank des modularen Designs lässt sich die Software zudem leicht an verschiedene Sensoren und Plattformen anpassen.
Mit der Veröffentlichung unter github.com/TUM-AVS/RoboRacer-3DLiDAR möchte das AVS Lab Forscher:innen, Entwickler:innen und Technikbegeisterte bei der Arbeit an fortschrittlichen autonomen Systemen unterstützen – und so Innovationen in dynamischen Robotik-Anwendungen beschleunigen