🚀 We are excited to share with you the results of hard work over the last couple of months: We released on Github today a complete Digital Twin of our Technische Universität München (TUM) EDGAR autonomous vehicle 🌐🚗.
🔍 What's a digital twin? A digital twin is a virtual model of a physical object or system. In our case, it's an advanced digital counterpart of our autonomous research vehicle, TUM EDGAR.
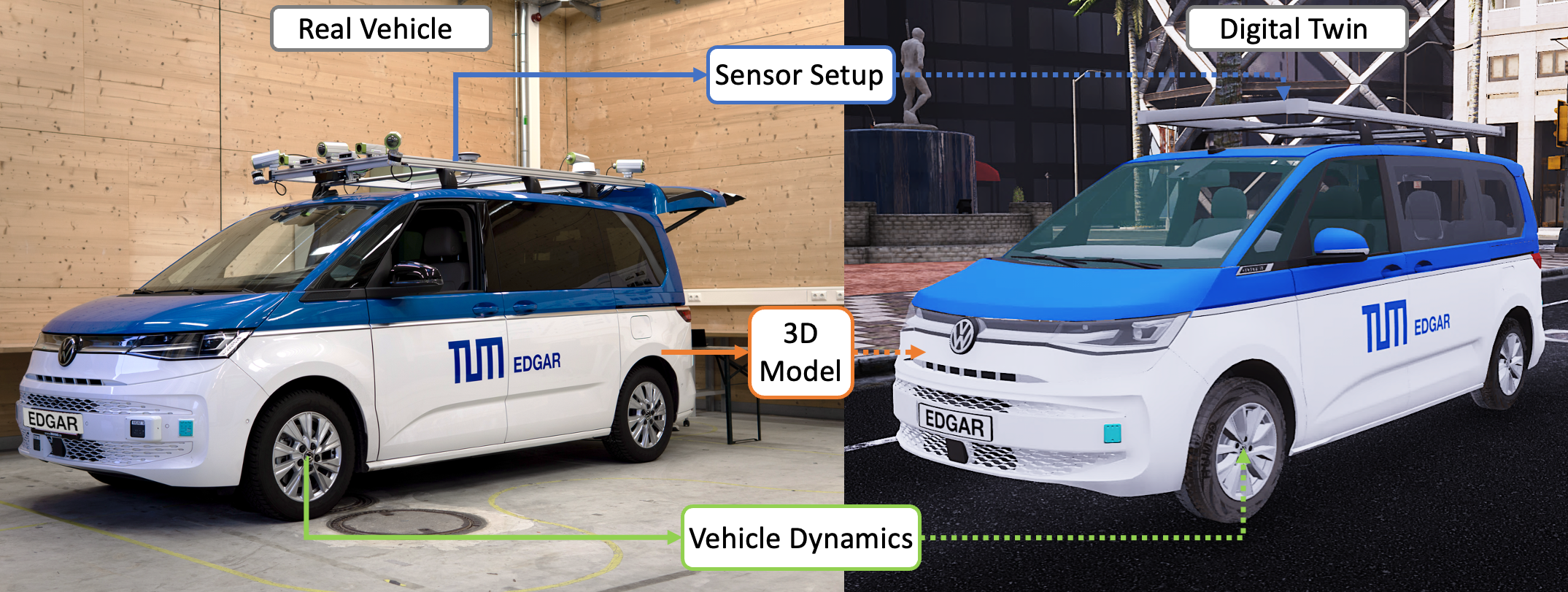
🤖🛠 The TUM EDGAR digital twin captures our vehicle's dynamic behavior, performance, and sensor characteristics in a detailed virtual environment. This allows us and interested researchers to simulate and interact with the TUM EDGAR autonomous vehicle in diverse 2D and 3D simulation environments.
👩💻👨💻 With this repository, you get:
- Detailed 3D simulation model
- Sensor parameters
- Vehicle dynamics parameters
- Integration guides for various environments
🌍 Whether you're a student, researcher, or autonomous vehicle enthusiast, this repository opens up a world of learning, experimentation, and innovation possibilities. We invite you to simulate the vehicle in your simulation or sandbox to test, modify, and enhance TUM EDGAR's capabilities with your autonomous vehicle software.
💡 We're excited to see how you use the TUM EDGAR Digital Twin to push the boundaries of autonomous vehicle research and development. Use your autonomous vehicle algorithms or start with open-source AV stacks like the Autoware Foundation. Share your projects and thoughts with us! If you do not have enough, give us a call, and we will try to bring your software to our real-world EDGAR here in Munich.
🔗 Dive into the world of autonomous vehicle simulation by visiting our GitHub page and reading the EDGAR Digital Twin Paper:
- Link to Github Repository: TUM EDGAR Digital Twin
- Link to Paper: EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Special thanks to the people who made that all possible: Phillip Karle, Tobias Betz, Marcin Bosk, Felix Fent, Nils Gehrke, Maximilian Geisslinger, Luis Gressenbuch, Philipp Hafemann, Sebastian Huber, Maximilian Hübner, Sebastian Huch. Gemb Kaljavesi, Tobias Kerbl, Dominik Kulmer, Sebastian Maierhofer, Tobias Mascetta, Florian Pfab, Filip Rezabek, Esteban Rivera, Simon Sagmeister, Leander Seidlitz, Florian Sauerbeck, Ilir Tahiraj, Rainer Trauth, Nico Uhlemann, Gerald Würsching, Baha Zarrouki, Matthias Althoff, Klaus Bengler, Georg Carle, Frank Diermeyer, Jörg Ott, Markus Lienkamp