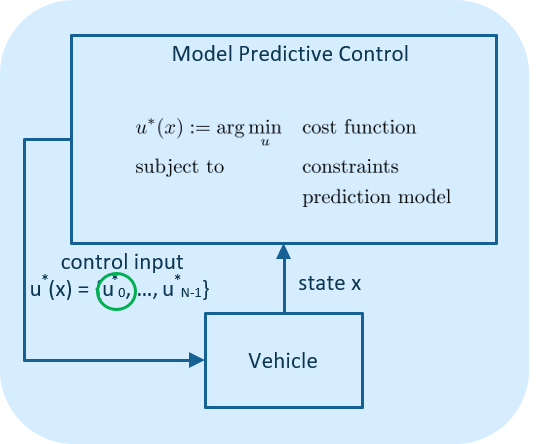
Excited to share that our Lab finished three papers new papers on topics we've been working on in the last couple of months. In these papers, we were pushing the limits of dealing with uncertainties and disturbances in nonlinear system dynamics with Stochastic, Robust and Adaptive Nonlinear Model Predictive Control approaches. Especially, we evaluated these new techniques through their application in motion control tasks for autonomous passenger vehicles.
The three papers are now available as preprints:
Paper 1: A Stochastic Nonlinear Model Predictive Control with an Uncertainty Propagation Horizon for Autonomous Vehicle Motion Control
Authors: B Zarrouki, C Wang, J Betz
Link: https://lnkd.in/dkaJExjv
Paper 2: R²NMPC: A Real-Time Reduced Robustified Nonlinear Model Predictive Control with Ellipsoidal Uncertainty Sets for Autonomous Vehicle Motion Control
Authors: B Zarrouki, J Nunes, J Betz
Link: https://lnkd.in/dY6dgaw3
Paper 3: Adaptive Stochastic Nonlinear Model Predictive Control with Look-ahead Deep Reinforcement Learning for Autonomous Vehicle Motion Control
Authors: B Zarrouki, C Wang, J Betz
Link: https://lnkd.in/dgd5QQYm
If you are interested in these type of research, we're happy to connect, exchange ideas and explore collaboration opportunities. Our research focuses on learning-based self-adaptive NMPC, with the aim of enhancing robustness and feasibility while optimizing closed-loop performance in nominal conditions, despite uncertainties, disturbances, and significant model mismatches. Feel free to reach out Baha Zarrouki (baha.zarrouki(at)tum.de), the main person behind this awesome research.
News
3 new papers - Control for Autonomous Vehicles